MDRS SSAM
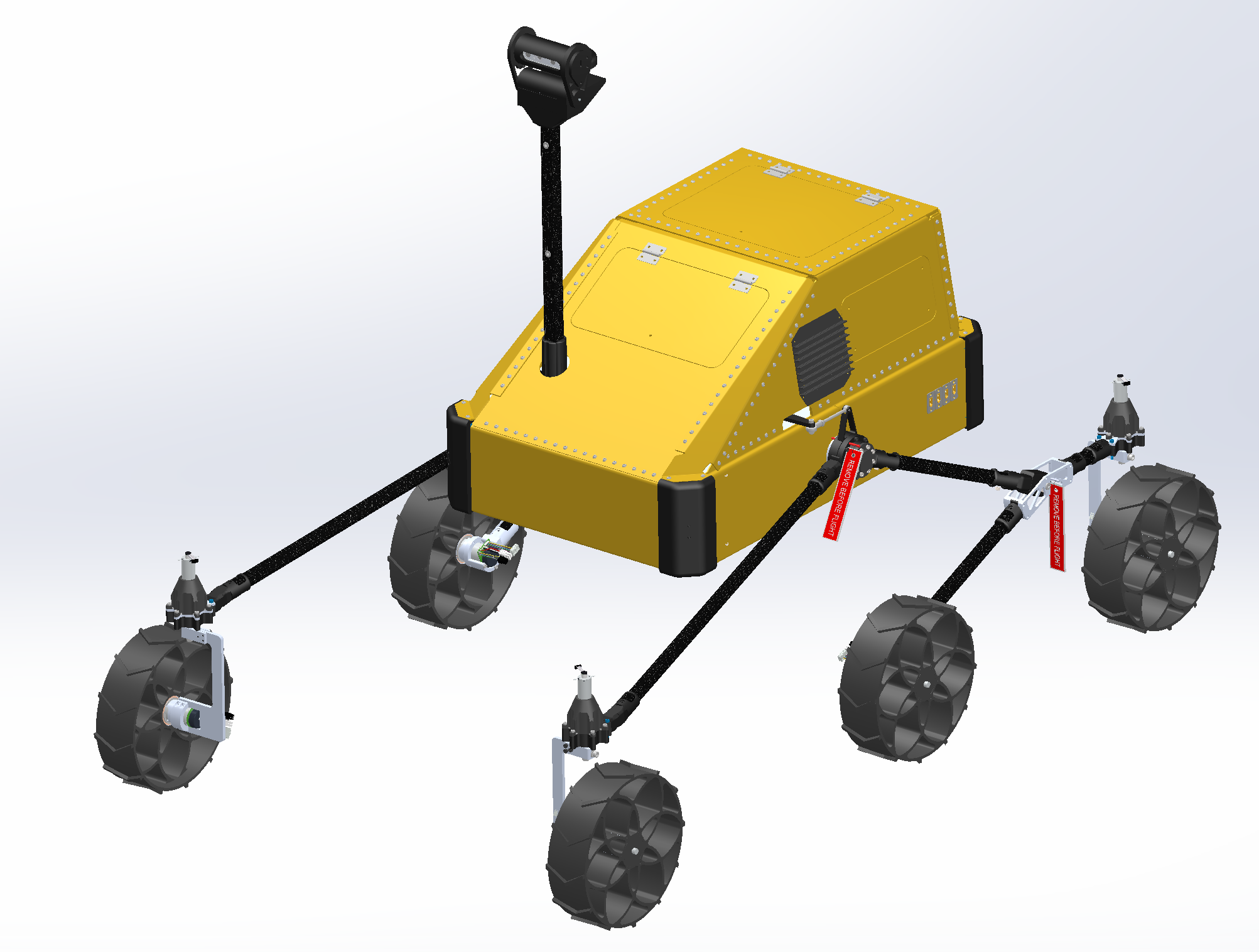
SSAM (Scout, Sample, and Map), known as the Scout system, is currently in development for the Mars Desert Research Station (MDRS) with support from the Mars Society.
Abstract
Informed mission planning is a crucial step for successful manned missions both in space and on other bodies. Precursor missions have frequently been used as both technological testbeds and implementers of prerequisite infrastructure to support future missions as part of an incremental space exploration strategy. While Mars presents a new opportunity for human exploration and long-term missions, it also presents new logistical challenges in mission planning and execution. This is due to environmental, communications, and resource availability challenges not experienced with manned missions within the Earth system. Consequently, missions designed for exploration and scouting of areas of interest before the arrival of humans become a necessity.
This project presents a vehicle design and mission architecture for a rapid, cost-efficient, and redundant scout system for high-fidelity mapping and exploration of mission areas. A swarm robotics approach utilizing highly-modular, simplified rover platforms and existing commercially available equipment are able to autonomously build 3D maps of large swaths of terrain that include information on topology, mineral concentrations, ambient conditions, and additional data pertinent to mission planning and in-situ resource utilization. Standardized, rack-style payload slots with integrated power support allow customization of the platforms for specialist roles without changes to overall design or logistics. This system represents a considerably valuable mechanism for increasing cost-efficiency and chance of mission-success of interplanetary operations from planning to end of mission life.
Testing
As part of our testing cycle, we’ll be deploying the rover to analog stations in Utah and the Arctic Circle. The data sheets for the Scout and arctic deployment can be found below. If you’re interested in testing a payload at an analog site and want to find out more about hosting your payload on our rover at these sites, get in contact here.
![]()
The project evolves in 2024!
By increasing the system’s reliability, enhancing its mapping capabilities, and reducing mission costs through the use of commercially available technology, the SSAM system is poised to become a critical tool for future Mars missions, enabling more efficient and safer exploration of the Red Planet.
Details of improvements to the SSAM robotic scouting system for high-fidelity mapping and exploration:
Improved Software for Faster Deployment: One of the key advancements in the SSAM system is the upgrade of its software architecture. The new software enables faster and more reliable deployment in extreme environmental conditions, such as those found on Mars. With enhanced real-time processing capabilities, the SSAM rovers can now quickly adapt to dynamic conditions, ensuring efficient scouting even in harsh terrain.
Swarm Robotics Approach: Leveraging a swarm robotics model, the SSAM system allows for multiple rovers to work in coordination, autonomously covering large areas. This modular approach provides redundancy and increases the overall speed and efficiency of the scouting process. Each rover in the swarm communicates with others, sharing data and optimizing their exploration routes to avoid overlap and maximize coverage.
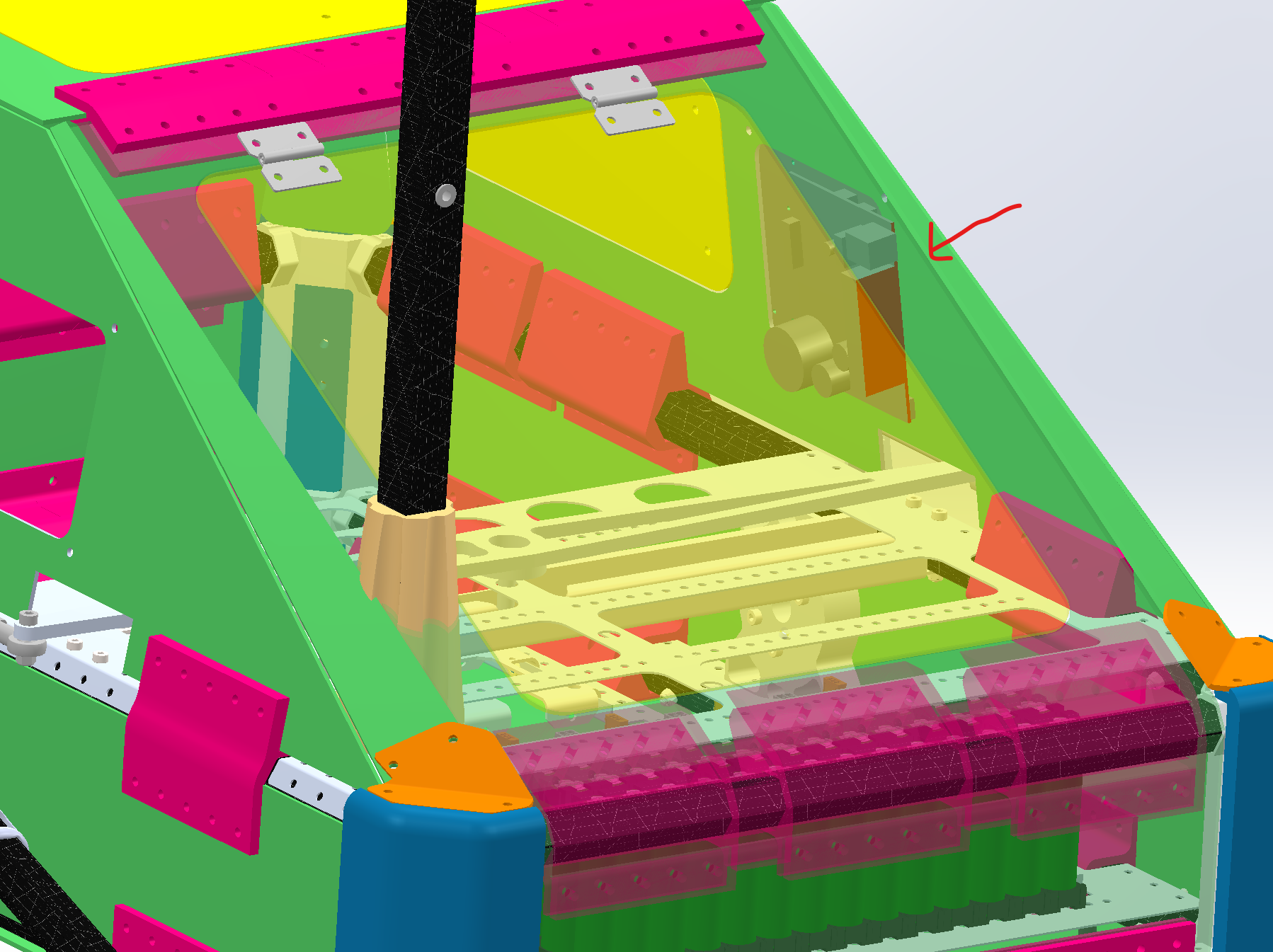
Advanced 3D Mapping and Data Collection: The SSAM rovers are now equipped with improved sensors for generating high-resolution 3D maps of the terrain. This includes detailed mapping of surface topology, mineral concentrations, and ambient environmental conditions. The ability to autonomously gather and process this data in real time is a critical feature that supports mission planning and helps identify key areas for resource utilization and landing site selection.
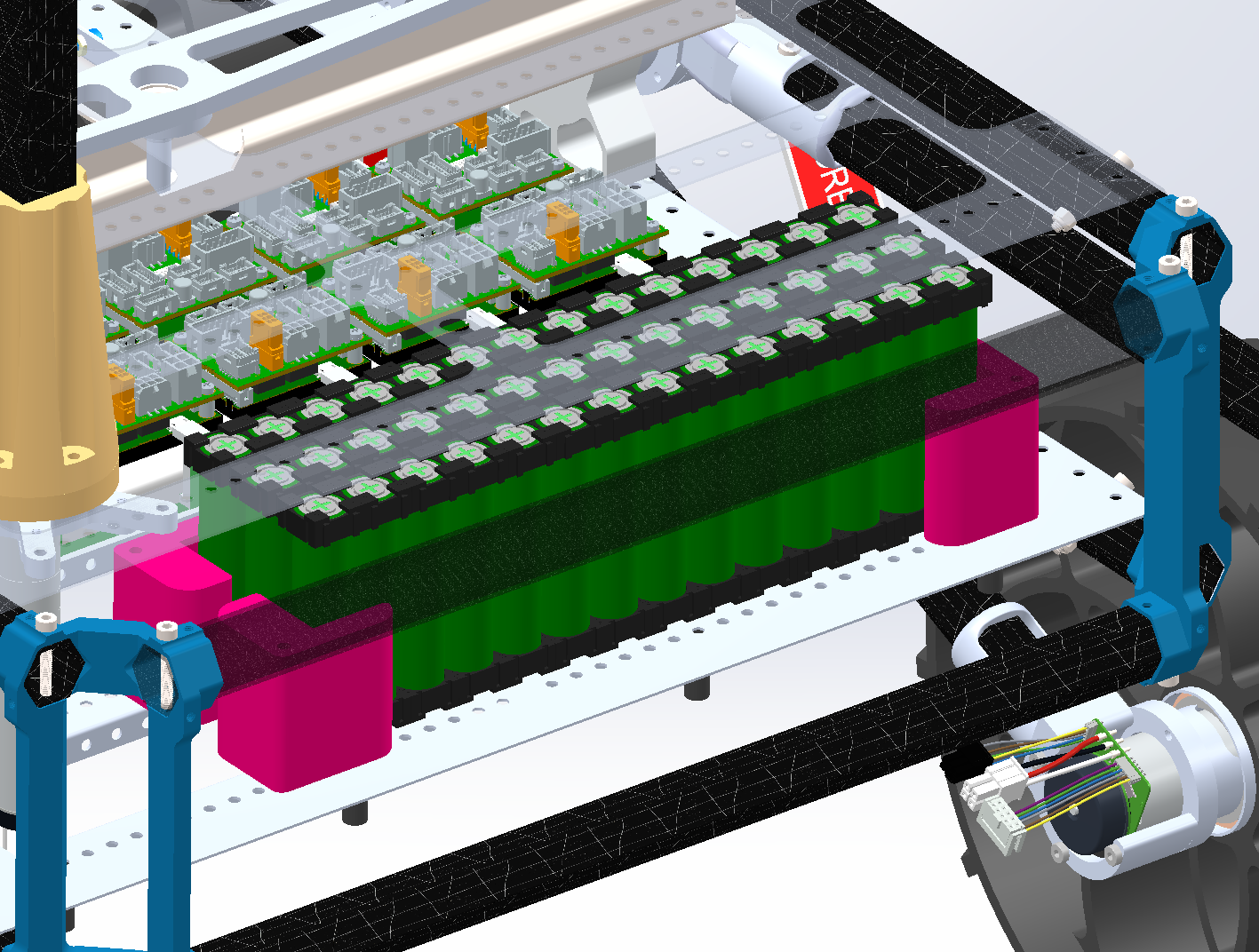
Updated Payload Interface System: A major upgrade to the SSAM platform is its updated payload interface system, which now meets industry standards for modularity and compatibility. This allows for greater flexibility, as the rovers can accommodate a wide range of mission-specific payloads with ease. The updated interface provides seamless power, data, and command integration, enabling customized mission payloads to be rapidly integrated and deployed without significant system modifications.
Commercial Technology Integration: To reduce costs and increase system reliability, the SSAM rovers now incorporate more commercially available technology. This makes the system more cost-effective and scalable, providing a ready-to-use solution that can be adapted for various interplanetary missions. The use of commercially available components also simplifies maintenance and repair, reducing the overall mission risk.
Future Directions: As the SSAM project progresses, the team is focused on further refining the system’s autonomous capabilities, with an emphasis on improving communication and data processing in real-time, especially in environments with limited bandwidth. Field tests in Mars-analog environments will continue, providing valuable insights for future missions. Collaboration with international space agencies and commercial partners remains a priority to ensure the SSAM platform meets the demands of future manned missions to Mars.
IAC 2024 Milan iPosters presentation
![]()